SIFT特征提取:图像中的"指纹识别"
探索尺度不变特征变换的神奇世界,让计算机像人眼一样"看懂"图像中的关键特征
什么是SIFT特征提取?
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)是一种强大的计算机视觉算法,它能从图像中提取出具有尺度不变性和旋转不变性的特征点,就像给图像中的每个重要部分打上独特的"指纹"。

原始图像

SIFT特征提取结果
想象一下,当你看到一张人脸时,你会自动关注眼睛、鼻子、嘴巴等关键部位。SIFT算法做的事情类似——它会自动寻找图像中最具辨识度的"关键点",如角点、边缘端点、斑点等。
与人类视觉不同的是,SIFT找到的特征点具有以下神奇特性:
- 尺度不变性:无论图像被放大还是缩小,都能识别出相同的特征点
- 旋转不变性:即使图像旋转了任意角度,特征点依然能被正确匹配
- 光照不变性:对光照变化有较强的抵抗能力
- 视角不变性:从不同角度观察同一物体,仍能识别出共同特征
🔍 小知识:SIFT算法由加拿大计算机科学家David Lowe于1999年提出,并在2004年发表了完整的论文。它被广泛认为是计算机视觉领域最具影响力的算法之一!
SIFT的工作原理:从图像到特征
SIFT算法的核心思想是在不同尺度下检测图像中的关键点,并为每个关键点生成一个独特的描述符。整个过程可以分为以下几个关键步骤:
尺度空间极值检测
通过构建高斯金字塔,在不同尺度下检测图像中的极值点(最大值或最小值),这些极值点可能是潜在的关键点。
关键点定位
对检测到的极值点进行精确位置和尺度的定位,去除低对比度和边缘响应的点,得到最终的关键点。
方向赋值
计算每个关键点周围区域的梯度方向直方图,选择主方向作为关键点的方向,使特征具有旋转不变性。
描述符生成
以关键点为中心,在其周围的邻域内,按照梯度方向直方图生成128维的特征描述符,这个描述符对光照、尺度和旋转变化具有较好的不变性。
SIFT尺度空间可视化
上图展示了SIFT算法中高斯金字塔的概念。每一组(octave)代表不同的尺度,每一层(level)代表同一组内不同模糊程度的图像。SIFT正是在这样的多尺度空间中寻找具有尺度不变性的特征点。
动手实践:用Python实现SIFT特征提取
接下来,我们将使用OpenCV库在Python中实现SIFT特征提取。在开始之前,请确保你已经安装了必要的依赖库:
pip install opencv-python numpy matplotlib下面是完整的SIFT特征提取代码实现:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置中文字体
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
# 读取图像
image_path = 'images/color_image.jpg'
image = cv2.imread(image_path)
if image is None:
print(f"无法读取图像: {image_path}")
exit()
# 转换为RGB格式(OpenCV默认读取为BGR)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 转换为灰度图用于SIFT检测
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 创建SIFT对象
sift = cv2.SIFT_create()
# 检测关键点和计算描述符
keypoints, descriptors = sift.detectAndCompute(gray_image, None)
# 在图像上绘制关键点
image_with_keypoints = cv2.drawKeypoints(
image_rgb, keypoints, None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
# 显示结果
plt.figure(figsize=(12, 8))
plt.imshow(image_with_keypoints)
plt.title('SIFT特征点检测结果')
plt.axis('off')
plt.tight_layout()
plt.show()
# 保存带特征点的图像
cv2.imwrite('images/sift_keypoints.jpg', cv2.cvtColor(image_with_keypoints, cv2.COLOR_RGB2BGR))
print('SIFT特征提取完成,图像已保存!')
SIFT特征点检测结果
💡 编程提示:在OpenCV 3.x版本中,SIFT算法被放在cv2.xfeatures2d.SIFT_create()中,而在OpenCV 4.x版本中,它被移到了cv2.SIFT_create()。如果你的代码报错,可以尝试切换到正确的函数调用方式。
亲手实现SIFT:一步步揭开算法的神秘面纱
上一节我们使用了OpenCV的现成函数实现了SIFT,但你是否好奇这个神奇算法背后的具体步骤?接下来,我们将亲手实现SIFT的核心步骤,并通过可视化中间结果,带你深入了解SIFT的工作原理。
为什么要自己实现SIFT?
通过亲手实现SIFT,你将:
- 真正理解SIFT算法的核心原理
- 掌握计算机视觉中特征提取的关键技术
- 能够根据具体需求调整和优化算法
- 为学习更高级的视觉算法打下坚实基础
1 高斯核生成:模糊的艺术
首先,我们需要生成高斯核,这是构建高斯金字塔的基础。高斯核就像一个"模糊滤镜",能够平滑图像并保留重要特征。
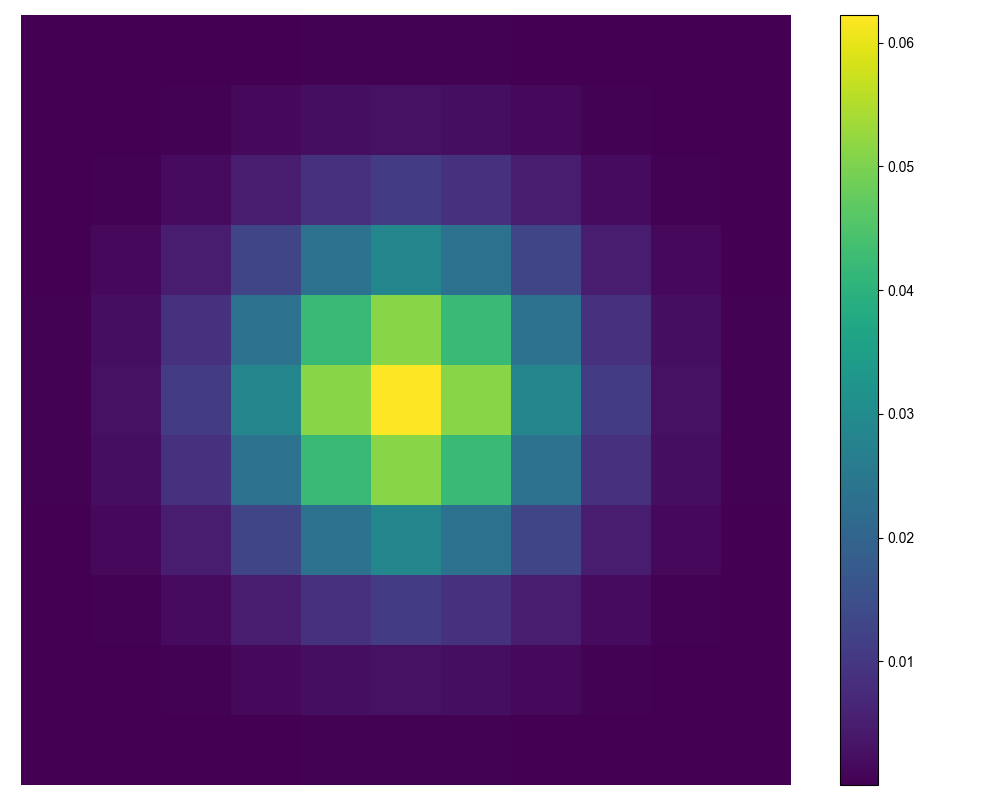
高斯核可视化

3D高斯核可视化
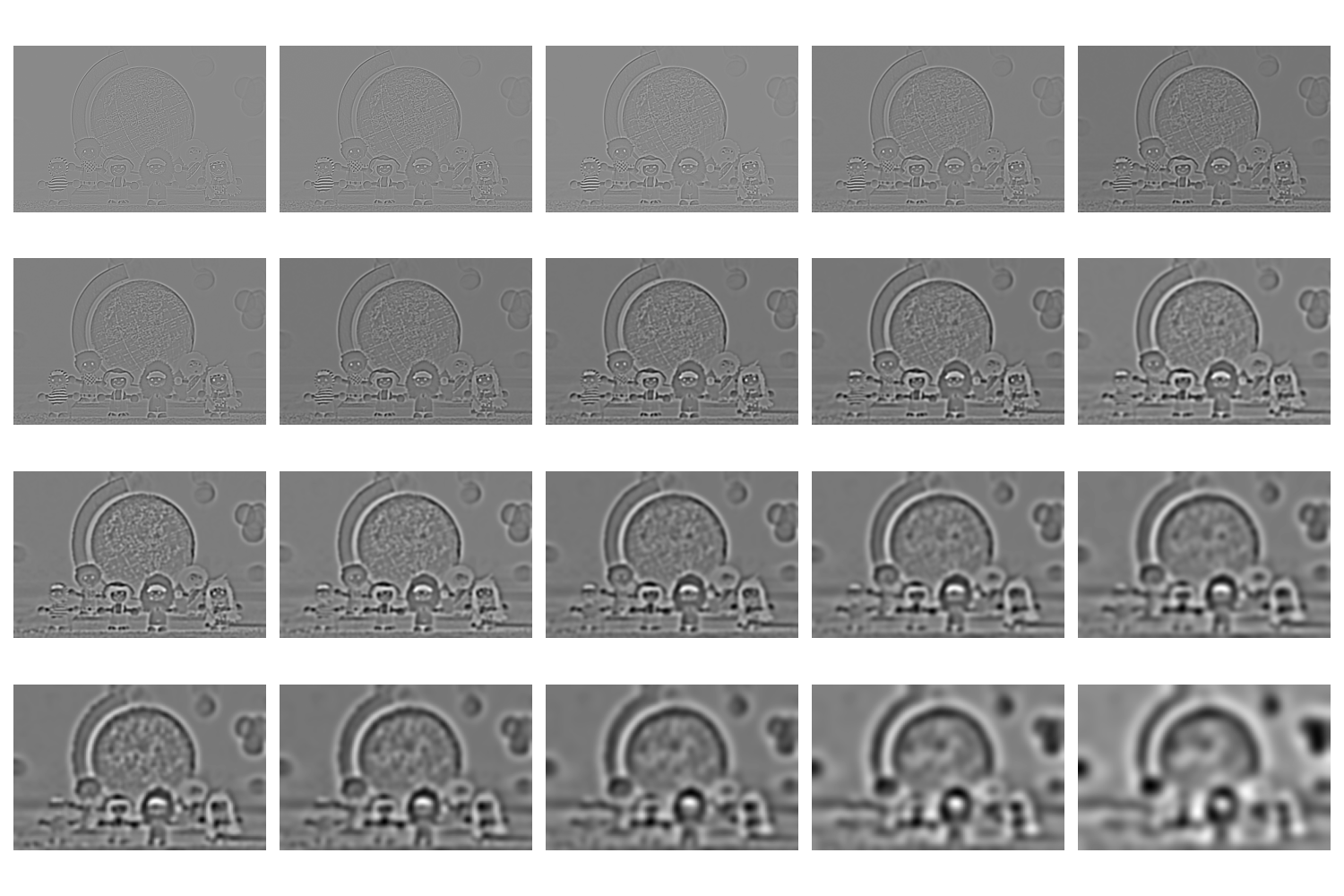
2 高斯金字塔:图像的"分身术"
接下来,我们构建高斯金字塔。想象一下,我们把图像复制成多个"分身",每个分身都有不同的模糊程度和尺寸。这就是高斯金字塔!

高斯金字塔可视化 (每组包含多个模糊程度不同的图像)
高斯金字塔由多个"组"(octave)组成,每组内有多个"层"(level)。每组的图像尺寸是前一组的一半,而每层的模糊程度逐渐增加。这样,我们就能在不同尺度上检测特征点。
3 DOG金字塔:寻找差异的艺术
DOG(Difference of Gaussians)金字塔是通过高斯金字塔中相邻两层相减得到的。它就像一个"差异检测器",能够突出显示图像中的边缘和角点。
DOG金字塔可视化 (亮部表示图像变化剧烈的区域)
你可以把DOG看作是图像的"导数",它放大了图像中的变化。SIFT正是在DOG金字塔中寻找局部极值点作为候选特征点。
4 特征点检测:大海捞针
现在,我们需要在DOG金字塔中寻找局部极值点,并过滤掉那些质量不高的特征点。这就像在茫茫大海中寻找珍贵的宝藏!
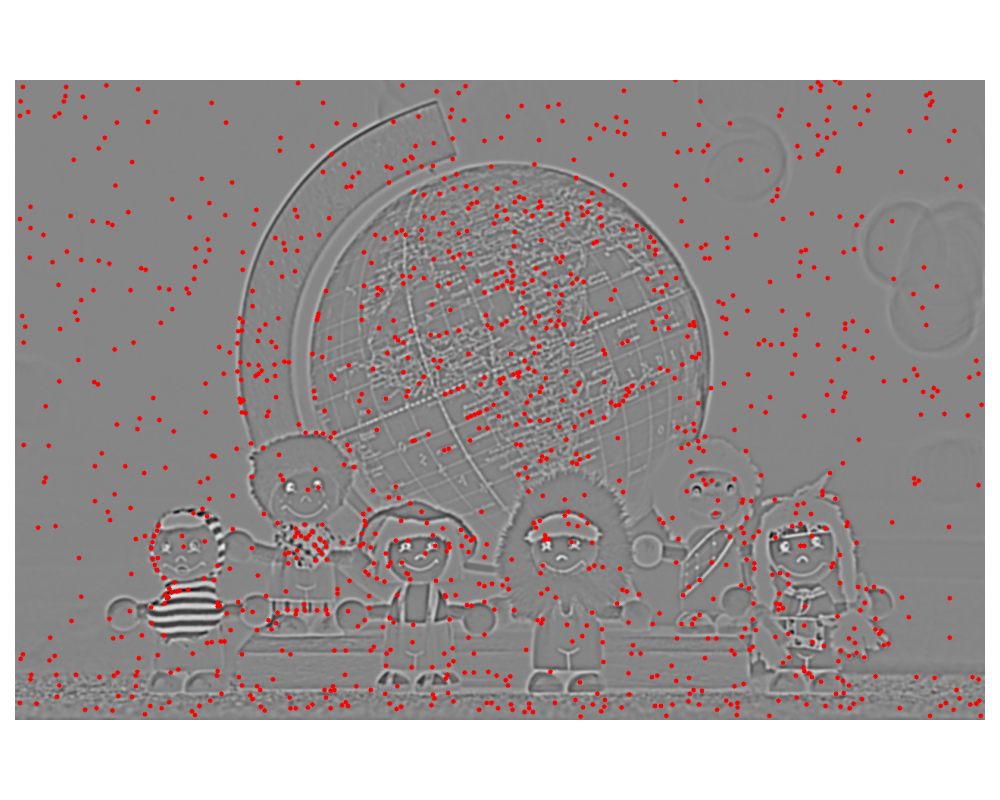
检测到的原始特征点
检测到的原始特征点中可能包含很多噪声点和边缘点。我们需要通过阈值过滤和Hessian矩阵检测来去除这些不好的特征点:

过滤后的特征点 (更加稳定和可靠)
5 方向分配:给特征点"定方向"
为了使特征点具有旋转不变性,我们需要为每个特征点分配一个主方向。这就像给每个特征点安装一个"指南针",无论图像怎么旋转,它们都能保持一致。
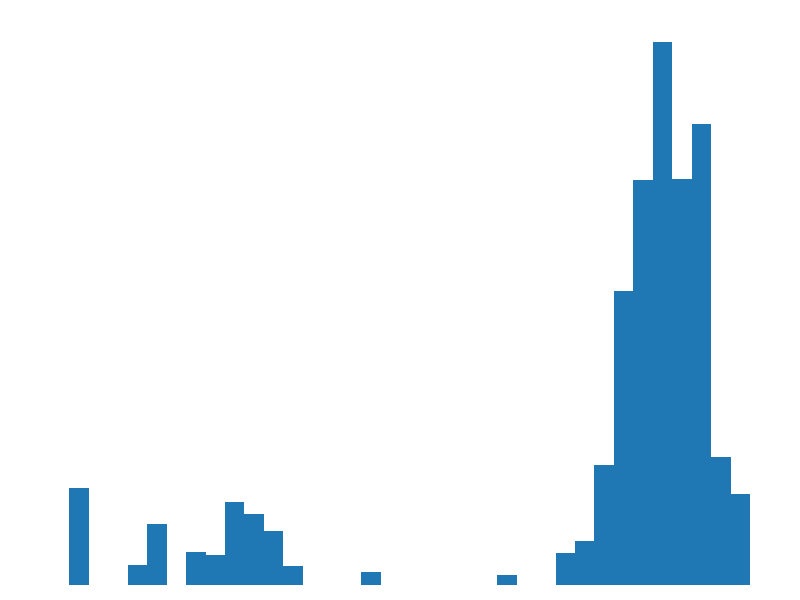
方向直方图1
方向直方图2
方向直方图3
方向直方图4
方向直方图5
想查看完整代码?
我们已经实现了一个完整的CustomSIFT类,包含了上述所有步骤。你可以在custom_sift.py文件中查看完整代码。运行该文件,它会自动生成所有中间结果图像,并保存在images文件夹中。
python custom_sift.py参数调优:不同参数下的SIFT效果对比
SIFT算法有几个重要参数可以调整,这些参数会影响特征点的数量和质量。下面是不同参数设置下的效果对比:

不同SIFT参数设置的效果对比
关键参数解析:
contrastThreshold
对比度阈值,用于过滤低对比度的关键点。值越小,检测到的关键点越多,但可能包含更多噪声点;值越大,检测到的关键点越少,但质量更高。默认值为0.04。
edgeThreshold
边缘阈值,用于过滤边缘上的关键点。值越大,允许更多的边缘点被保留;值越小,过滤掉的边缘点越多。默认值为10。
nOctaveLayers
每组(octave)中的层数。值越大,尺度空间的采样越密集,但计算量也越大。默认值为3。
sigma
初始高斯模糊的标准差。这个参数决定了金字塔底层图像的模糊程度。默认值为1.6。
SIFT的应用:从理论到实践
SIFT特征提取算法因其强大的不变性,在计算机视觉领域有着广泛的应用。以下是一些常见的应用场景:
图像拼接
SIFT可以帮助找到多张图像之间的对应点,从而将它们无缝拼接成一张全景图。你的手机全景拍照功能,很可能就用到了SIFT或类似的特征提取算法!
图像检索
通过提取图像的SIFT特征,可以构建图像的"指纹"数据库。当你上传一张照片时,系统可以快速检索出数据库中相似的图像,这在版权保护和相似图片推荐中非常有用。
3D重建
从不同角度拍摄同一物体的多张照片,利用SIFT找到对应点,就可以重建出物体的3D模型。这在文物保护、工业设计等领域有着重要应用。
机器人导航
机器人可以通过提取环境中的SIFT特征来构建地图,并确定自己的位置。这是视觉SLAM(同步定位与地图构建)技术的一部分。
🚀 行业应用:谷歌的Street View(街景视图)使用SIFT-like算法来拼接数十亿张街景照片,创造出无缝的沉浸式体验。通过Google街景服务,下次使用谷歌地图的街景功能时,你可以想想背后默默工作的SIFT算法!
SIFT的故事:从学术论文到产业应用
🧙♂️ David Lowe与SIFT的诞生
SIFT算法的故事始于1999年,当时加拿大不列颠哥伦比亚大学的David Lowe教授发表了一篇关于尺度不变特征的论文。在这篇论文中,他提出了一种新的特征提取方法,能够在不同尺度和旋转下识别图像中的关键点。
Lowe教授并不是一蹴而就发明了SIFT。事实上,他从1990年代初就开始研究特征提取问题,经过近十年的不断改进和完善,才最终形成了SIFT算法。2004年,他发表了更完整的论文《Distinctive Image Features from Scale-Invariant Keypoints》,这篇论文至今已被引用超过10万次,成为计算机视觉领域引用量最高的论文之一。
⚖️ 专利争议:从开源到商业化
SIFT算法的巨大成功也带来了专利争议。2003年,不列颠哥伦比亚大学为SIFT申请了专利,并将专利授权给了一家名为ViXS Systems的公司。这导致SIFT在商业应用中受到了限制,许多开源项目不得不寻找替代算法。
直到2020年3月,SIFT专利才正式过期,这使得SIFT可以自由地在商业和开源项目中使用。专利过期后,OpenCV等开源库很快将SIFT重新集成到了主流版本中,让更多开发者能够受益于这项强大的技术。
🔍 SIFT的继任者们
尽管SIFT已经非常强大,但研究人员并没有停止前进的脚步。在SIFT的基础上,又发展出了一系列改进算法,如SURF、ORB、BRISK等。这些算法在保持SIFT核心优点的同时,进一步提高了计算效率或匹配精度。
例如,SURF(Speeded Up Robust Features)算法通过使用盒式滤波器代替高斯滤波器,大大提高了计算速度;ORB(Oriented FAST and Rotated BRIEF)算法则通过结合FAST关键点检测和BRIEF描述符,在保持性能的同时,进一步降低了计算复杂度。
SIFT:计算机视觉的"金钥匙"
SIFT特征提取算法是计算机视觉领域的一个里程碑式的成果。它通过模拟人类视觉系统的特性,让计算机能够"理解"图像中的关键特征,为图像拼接、物体识别、3D重建等任务打开了新的可能性。
从David Lowe教授的最初研究,到如今广泛的产业应用,SIFT的发展历程告诉我们:基础研究的突破往往能够带来意想不到的应用前景。即使在深度学习时代,像SIFT这样的传统算法仍然在许多场景中发挥着重要作用。
📝 今日知识点回顾
- SIFT是一种具有尺度不变性和旋转不变性的特征提取算法
- 核心步骤:尺度空间极值检测、关键点定位、方向赋值、描述符生成
-
Python实现:使用OpenCV的
cv2.SIFT_create()函数 - 应用场景:图像拼接、图像检索、3D重建、机器人导航等
- SIFT由David Lowe教授于1999年提出,2020年专利过期后被广泛应用
想进一步探索SIFT的世界吗?你可以尝试实现SIFT特征匹配,或者比较SIFT与其他特征提取算法(如SURF、ORB)的性能差异。也可以尝试将SIFT应用于自己的项目中,比如创建一个简单的图像检索系统。