Canny边缘检测:让图像"棱角分明"的艺术
为什么计算机能"看到"图像中的物体边缘?如何让机器像人类一样识别物体的轮廓?Canny边缘检测算法为我们提供了一个优雅的解决方案!
什么是Canny边缘检测?—— 图像的"轮廓识别术"
想象一下,你在一张白纸上用黑笔勾勒出一个苹果的轮廓。这个轮廓就是苹果的边缘,它定义了苹果的形状和边界。在数字图像中,边缘同样是理解图像内容的关键线索。
Canny边缘检测是一种广泛应用的边缘检测算法,它能够在噪声图像中准确地检测出物体的边缘。与简单的边缘检测方法相比,Canny算法更加"智能"——它不仅能找到边缘,还能将边缘连接成完整的轮廓。
🤔 小思考:为什么叫"Canny"边缘检测?因为它是由美国计算机科学家约翰·坎尼(John F. Canny)在1986年提出的。坎尼当时的目标是开发一种"最优边缘检测器",而他的算法确实成为了边缘检测领域的标杆。
Canny边缘检测的神奇之处在于,它能够在保留重要边缘的同时,有效地抑制图像中的噪声。这使得它在自动驾驶、医学影像分析等对精度要求较高的领域有着广泛的应用。
Canny边缘检测的工作原理 —— 四步打造完美边缘
Canny边缘检测并不是一个简单的操作,而是由四个连续的步骤组成的流程。就像制作一道精致的菜肴需要多道工序一样,Canny算法也需要经过以下四个步骤:
高斯滤波:给图像"去噪"
第一步是使用高斯模糊去除图像中的噪声。这就像是在寻找边缘前先清理画面,让真正的边缘更容易被发现。
3×3 高斯核示例:
[0.0751 0.1238 0.0751] [0.1238 0.2042 0.1238] [0.0751 0.1238 0.0751]
梯度计算:找出"变化最快"的地方
第二步是计算图像的梯度。梯度表示图像中像素值变化的速率和方向。在边缘处,像素值变化剧烈,梯度值也较大。
通常使用Sobel算子来计算梯度:
水平Sobel算子:
[-1 0 1] [-2 0 2] [-1 0 1]
垂直Sobel算子:
[-1 -2 -1] [ 0 0 0] [ 1 2 1]
非极大值抑制:让边缘"变细"
第三步是进行非极大值抑制。这一步会"细化"边缘,只保留梯度方向上的局部最大值,从而得到更细、更清晰的边缘。
想象一下,将边缘比作一座山峰,非极大值抑制就像是只保留山峰的脊线,而去除两侧的斜坡。
双阈值检测:连接边缘"碎片"
最后一步是双阈值检测。这一步使用两个阈值(高阈值和低阈值)来筛选边缘像素,并将孤立的边缘像素连接成完整的轮廓。
- 高于高阈值的像素被直接认定为边缘像素
- 低于低阈值的像素被排除
- 介于两者之间的像素,如果与边缘像素相连,则被保留;否则被排除
动手实践:用Python实现Canny边缘检测
理论讲完了,咱们来动手试试!用Python实现Canny边缘检测就像组装一台精密的机器,只需要准备两个"工具包":
- OpenCV库:提供了现成的Canny边缘检测函数(相当于你的"全自动边缘检测机")
- Matplotlib库:用于显示图像(相当于你的"图像显示器")
如果你还没有这些库,可以先在终端里输入这行命令安装:
pip install opencv-python matplotlib然后复制下面这段代码,保存为canny_edge_detection.py,运行后就能看到Canny边缘检测的效果啦!
# 导入需要的库
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取彩色图像
color_image = cv2.imread('images/color_image.jpg')
# 检查图像是否成功读取
if color_image is None:
print('无法读取图像,请检查文件路径是否正确')
exit()
# 转换为RGB格式(因为OpenCV默认读取的是BGR格式)
rgb_image = cv2.cvtColor(color_image, cv2.COLOR_BGR2RGB)
# 转换为灰度图像
gray_image = cv2.cvtColor(color_image, cv2.COLOR_BGR2GRAY)
# 方法1:使用OpenCV内置函数实现Canny边缘检测
# 参数说明:50和150分别是低阈值和高阈值
canny_edges = cv2.Canny(gray_image, 50, 150)
# 尝试不同的阈值组合
canny_edges_low = cv2.Canny(gray_image, 30, 100) # 低阈值组合
canny_edges_high = cv2.Canny(gray_image, 100, 200) # 高阈值组合
# 方法2:手动实现简化版Canny边缘检测(仅作演示)
def simple_canny(image, low_threshold, high_threshold):
# 1. 高斯模糊去噪
blurred = cv2.GaussianBlur(image, (5, 5), 1.5)
# 2. 计算梯度
grad_x = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
grad_y = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值和方向
magnitude = np.sqrt(grad_x**2 + grad_y**2)
direction = np.arctan2(grad_y, grad_x) * (180 / np.pi)
# 3. 非极大值抑制(简化版)
edges = np.zeros_like(image)
for i in range(1, image.shape[0]-1):
for j in range(1, image.shape[1]-1):
# 这里省略了复杂的方向判断,仅保留梯度幅值大于阈值的点
if magnitude[i, j] > low_threshold:
edges[i, j] = 255
# 4. 双阈值检测(简化版)
# 这里仅使用单一阈值,实际应用中应使用双阈值
return edges
# 手动实现的Canny边缘检测
manual_canny = simple_canny(gray_image, 50, 150)
# 显示原图和不同方法得到的边缘检测结果
plt.figure(figsize=(20, 10))
plt.subplot(231)
plt.imshow(rgb_image)
plt.title('彩色原图')
plt.axis('off')
plt.subplot(232)
plt.imshow(gray_image, cmap='gray')
plt.title('灰度图像')
plt.axis('off')
plt.subplot(233)
plt.imshow(canny_edges, cmap='gray')
plt.title('OpenCV Canny边缘检测 (50, 150)')
plt.axis('off')
plt.subplot(234)
plt.imshow(canny_edges_low, cmap='gray')
plt.title('低阈值Canny (30, 100)')
plt.axis('off')
plt.subplot(235)
plt.imshow(canny_edges_high, cmap='gray')
plt.title('高阈值Canny (100, 200)')
plt.axis('off')
plt.subplot(236)
plt.imshow(manual_canny, cmap='gray')
plt.title('手动实现简化版Canny')
plt.axis('off')
plt.tight_layout()
plt.show()
# 保存边缘检测结果
cv2.imwrite('images/canny_edges.jpg', canny_edges)
print('边缘检测图像已保存!')💡 小技巧:阈值的选择对Canny边缘检测的结果影响很大。低阈值会检测出更多的边缘(包括噪声),高阈值会检测出更少但更明显的边缘。通常需要根据具体图像进行调整,找到最合适的阈值组合。
效果对比:Canny边缘检测的"魔力"
下面是同一张图像的原图和不同阈值下的Canny边缘检测效果对比。仔细看看,不同的阈值如何影响边缘检测的结果:

彩色原图
包含丰富的色彩和细节
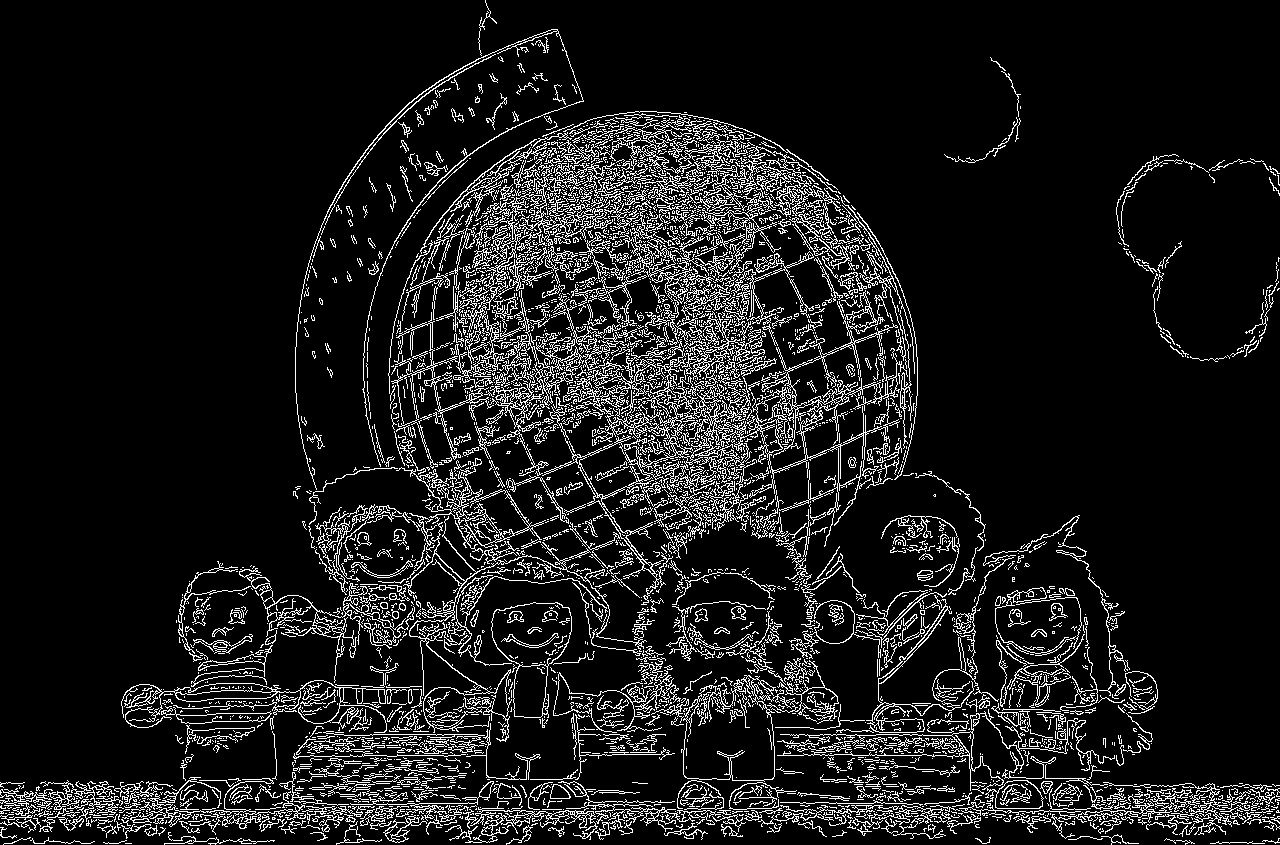
低阈值检测
检测出更多细节和噪声

高阈值检测
仅保留明显的边缘
你可能会发现,低阈值检测能够捕捉到更多的细节,但也容易受到噪声的干扰;而高阈值检测虽然能够过滤掉大部分噪声,但可能会丢失一些重要的细节边缘。在实际应用中,需要根据具体需求选择合适的阈值。
Canny边缘检测的应用:从自动驾驶到医学影像
Canny边缘检测不仅仅是一个有趣的图像处理算法,它还有着广泛的实际应用。从自动驾驶汽车的视觉系统,到医生用来诊断疾病的医学影像,Canny算法都在默默地发挥着作用。
自动驾驶
自动驾驶汽车需要"看到"道路的边缘、车道线和其他车辆的轮廓。Canny边缘检测能够帮助汽车的视觉系统准确地识别这些重要的视觉线索,从而做出正确的驾驶决策。
医学影像分析
在医学影像中,医生常常需要识别器官、肿瘤或其他异常组织的轮廓。Canny边缘检测能够帮助医生更清晰地看到这些结构,从而提高诊断的准确性。例如,在CT扫描中,Canny算法可以帮助识别肺部结节的边缘。
工业检测
在工业生产中,机器视觉系统常常需要检测产品的缺陷,如裂缝、划痕等。Canny边缘检测能够帮助系统准确地识别这些缺陷的边缘,从而提高产品质量控制的效率和准确性。
图像分割
在图像分割任务中,我们常常需要将图像中的不同物体分开。Canny边缘检测能够帮助我们找到物体的边界,从而为进一步的分割提供重要的线索。例如,在卫星图像中,Canny算法可以帮助分割不同的地物类型。
机器人视觉
机器人需要通过视觉系统来感知周围的环境。Canny边缘检测能够帮助机器人识别物体的形状和位置,从而实现抓取、放置等操作。例如,在工业机器人中,Canny算法可以帮助机器人准确地定位零件的边缘。
人脸识别
在人脸识别系统中,边缘检测是一个重要的预处理步骤。Canny算法可以帮助系统提取人脸的轮廓和特征点,如眼睛、鼻子、嘴巴的边缘,从而提高人脸识别的准确性。
🎯 实际应用:你知道吗?智能手机上的"人脸解锁"功能很可能就用到了Canny边缘检测算法!它能够帮助手机快速、准确地识别你的面部特征,让你只需看一眼手机就能解锁。
Canny边缘检测的故事:从学术论文到行业标准
🧙♂️ 约翰·坎尼:边缘检测的"魔法师"
1986年,一位名叫约翰·坎尼(John F. Canny)的计算机科学家在《IEEE模式分析与机器智能汇刊》上发表了一篇题为《A Computational Approach to Edge Detection》的论文。在这篇论文中,他提出了一种全新的边缘检测算法,也就是我们今天所熟知的Canny边缘检测。
坎尼当时的目标是开发一种"最优边缘检测器",能够同时满足以下三个条件:
- 低错误率:尽可能多地检测出真正的边缘,同时尽可能少地将非边缘误判为边缘
- 高定位精度:检测出的边缘应尽可能接近实际边缘的位置
- 单边缘响应:每个实际边缘应只对应一个检测结果,不应出现多个响应
坎尼的算法成功地满足了这些条件,成为了边缘检测领域的标杆。
📈 从实验室到行业:Canny算法的"逆袭"
尽管Canny算法在学术上取得了巨大的成功,但它的真正价值在于其广泛的实际应用。从最初的学术论文,到如今成为计算机视觉领域的基础算法之一,Canny边缘检测经历了一次精彩的"逆袭"。
如今,几乎所有的图像处理库(如OpenCV)都包含了Canny边缘检测的实现。无论是自动驾驶汽车、医疗 imaging设备,还是智能手机的相机应用,都可能在某个环节用到了Canny算法。
这一切都源于约翰·坎尼在1986年提出的那个看似简单却蕴含深刻智慧的算法。
⚔️ 边缘检测的"江湖": Canny与其他算法的较量
在Canny算法出现之前,已经有许多边缘检测算法,如Sobel、Prewitt、Roberts等。这些算法各有优缺点,但都无法同时满足低错误率、高定位精度和单边缘响应这三个条件。
Canny算法的出现,就像是在边缘检测的"江湖"中出现了一位"武林高手",它凭借着独特的"四步心法"(高斯滤波、梯度计算、非极大值抑制、双阈值检测),在众多算法中脱颖而出,成为了边缘检测的首选算法。
当然,随着深度学习的兴起,一些基于神经网络的边缘检测方法也开始崭露头角。但Canny算法依然因其简单、高效、稳定的特点,在许多场景中发挥着不可替代的作用。
Canny边缘检测:简单中的大智慧
Canny边缘检测看起来只是一个简单的图像处理算法,但背后却蕴含着深刻的数学原理和工程智慧。从1986年的一篇学术论文,到如今成为计算机视觉领域的基础算法之一,Canny算法的成功故事告诉我们:好的算法往往是简洁而优雅的。
下次当你使用手机的人脸解锁功能,或者看到自动驾驶汽车在道路上行驶时,不妨想想这背后可能就有Canny边缘检测算法在默默地工作——它帮助机器"看到"了世界的轮廓,让人工智能离我们的生活更近了一步。
📝 今日知识点回顾
- Canny边缘检测是一种四步流程:高斯滤波、梯度计算、非极大值抑制、双阈值检测
- 核心思想是在抑制噪声的同时,准确地检测出物体的边缘
-
Python实现:使用OpenCV的
cv2.Canny()函数 - 应用场景:自动驾驶、医学影像分析、工业检测、图像分割等
- 由约翰·坎尼在1986年提出,目标是开发一种"最优边缘检测器"
想挑战一下自己吗?试着用今天学到的知识,调整Canny边缘检测的阈值参数,看看不同参数对检测结果的影响。或者尝试实现Canny算法的各个步骤,深入理解其工作原理!